双频激光干涉仪ZLM700
产品功能 定位精度、重复定位精度、位移距离测量、速度加速度测量、线性度、直线度、垂直度、平面度、偏摆角、俯仰角、滚动角、角速度、圆形轨迹、微振动测量,还能够测量数控机床回转台的定位精度和重复定位精度等,从而实现定位、校准、控制和补偿。ZLM700主要用于单轴系统的校准和测量,广泛应用于高速动态加工工艺中的机械定位和系统控制。性能优势
l 真正意义上的双频激光干涉仪,频差为640MHz。请用户注意“激光干涉仪”和“双频激光干涉仪”的区别。众所周知双频激光干涉仪精度更好、性能更稳定。世界范围内只有两家双频激光干涉仪的生产商,德国耶拿尔公司是其中的一家。
l 全部部件皆在德国生产制造,绝非为了降低成本而在第三方国家进行部件加工。光学组件全部采用蔡司光学镜,是世界上一家将的蔡司光学镜用于激光干涉仪领域的产品制造商。
l 测量系统采用模块化设计,各种测量功能之间互不影响。若用户先期只需要干涉仪的部分功能(如仅测量直线度),则仅采购所需功能部分的光学部件(直线度光学镜),其他不需要的功能暂时可以不采购;若后期有其他功能的需求,补充采购功能对应的部件即可。
l 激光器寿命更长,可达20000小时,激光稳频精度高,一小时内为±0.002ppm,在产品寿命内可达±0.02ppm。
l 干涉镜采用差分干涉原理,系统精度更高,可达±0.4ppm。
l 计算机辅助光路调整,调整结果更。
l 采样频率更快,达1MHz,可在0.001Hz-1MHz之间进行选择。
l 被测物体最大速度16m/s(可选);采用高精度AE950 PCI数据处理器,分辨率达0.6nm(当移动速度为1m/s时,线性分辨率更可高达为0.1nm)。
l 无加速度限制;当光线微弱时,性能也十分稳定。
l 信号延时<200ns;对电磁干扰不敏感。
l 对于多轴联动的复杂光路测量和微位移测量,请选用ZLM800型双频激光干涉仪,最多可实现六轴联动。
工作原理
专利型ZLM700激光干涉仪使用氦氖激光器,采用双频外差式工作模式。激光稳频精度为+/-0.002ppm,640MHz的频差用于信号处理。这种高频处理信号能够对高速物体进行测量,不会出现干扰误差,信号延时时间极短。
采用光纤电缆,把来自干涉镜的信号传输到计算机卡槽连接的电子计数器上,避免了外部电磁环境对测量信号的干扰。因此,ZLM700双频激光干涉仪特别适用于恶劣的生产环境、标准化实验室和高真空环境。
技术参数
| 型号:ZLM700 | 使用高性能数据处理器AE950 PCI |
| He-Ne激光平均波长: | 632.8 nm |
| 激光稳频精度: | 一小时2x10-9(±0.002ppm) 寿命内2x10-8(±0.02ppm) |
| 系统精度(0-40℃时): | ±0.4ppm |
| 光束直径: | 6mm (可选3.2mm) |
| 激光管突发最大输出功率: | 1mW (激光等级2) |
| 每束光可测量的轴数: | 1 |
| 线性测量距离: | 40m,可扩展为120m |
| 角度测量范围: | ± 15°,20m轴线范围 |
| 平面度测量范围: | 20m行程 |
| 直线度测量范围: | ± 5mm,2m或10m行程, 选用角度干涉仪可测30m行程 |
| 垂直度测量范围: | ± 5mm,2m或10m行程, 30m行程需用角度干涉仪 |
| 最大速度: | 4m/s,可选16m/s 80rad/s,角速度 |
| 最大加速: | 无限制 |
| 采样频率: | 内部1MHz,外部40MHz |
| 预热时间: | 10分钟 |
| 精度/非线性: | ±0.3nm (角隅反射镜) ±0.1nm (平面反射镜) |
| 距离测量分辨率: | 0.6nm (角隅反射镜) 0.3nm (平面反射镜) 0.1nm 可选 |
| 距离测量精度: (20°±0.5°) 使用AUK时 (20°±0.5°) 真空中时 | ±0.4ppm (μ/m) ±0.08 (±0.02)ppm (μ/m) |
| 线性度测量分辨率: | 0.6nm (角隅反射镜) 0.3nm (平面反射镜) 0.1nm 可选 |
| 线性度测量精度: (20°±0.5°) 使用AUK时 (20°±0.5°) 真空中时 | ±0.4ppm (μ/m) ±0.08 (±0.02)ppm (μ/m) |
| 速度测量精度: | ±0.5ppm实测值 |
| 角度测量分辨率: | 0.015μrad (3x10-3 弧秒) |
| 角度测量精度: | ±0.1ppm实测值 |
| 平面度测量分辨率: | 0.015μrad (3x10-3 弧秒) |
| 平面度测量精度: | ±0.2%实测值 ±0.05 弧度/米运行距离 |
| 直线度测量分辨率: | 36nm,10m行程 7.25nm,2m行程 |
| 直线度测量精度: | ±0.5%实测值,2m行程 ± 2.5%实测值,10m行程 |
| 垂直度测量分辨率: | 36nm,10m行程 7.25nm,2m行程 |
| 垂直度测量精度: | ±0.5%实测值2m,± 0.5弧秒* ±2.5%实测值10m,± 0.5弧秒* |
| 数据接口: | 积分信号 32 Bit (实时时间) Dt » 20 ns |
| 数据分析标准: | ISO230/VDI3441/VDI2617/NMTBA |
| 工作环境: | 温度:15°C-30°C 湿度:<90%无冷凝 |
| 储存环境: | 温度:10°C-40°C 湿度:<95%无冷凝 |
应用光路图
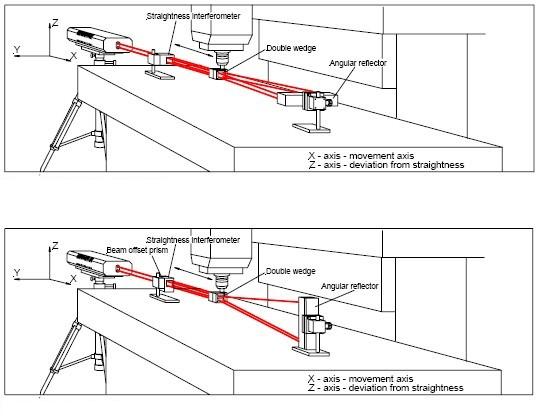 以上为直线度测量示意图,包括水平方向直线度和垂直方向直线度
以上为直线度测量示意图,包括水平方向直线度和垂直方向直线度
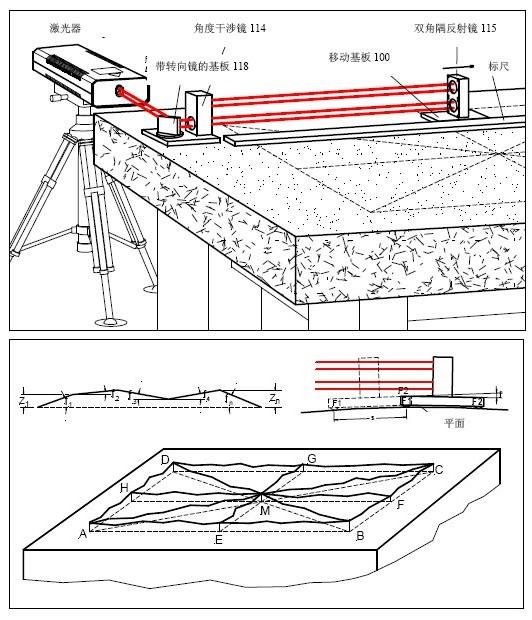 以上是平面度测量示意图
以上是平面度测量示意图
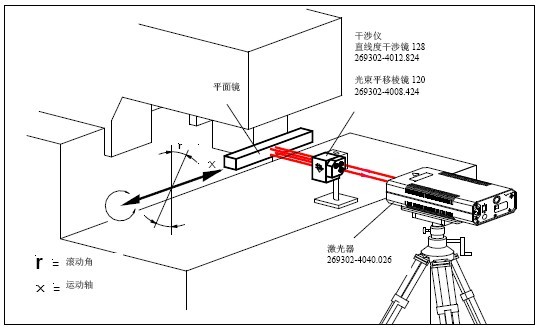
 以上是垂直度测量示意图
以上是垂直度测量示意图
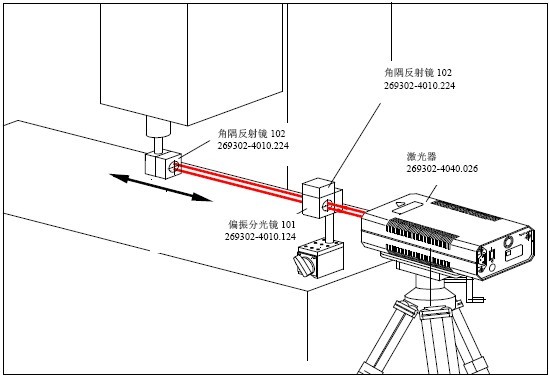 以上是位移、线性度、速度、加速度、定位精度测量示意图
以上是位移、线性度、速度、加速度、定位精度测量示意图
 以上是对角测量示意图
以上是对角测量示意图
 以上是俯仰角测量示意图
以上是俯仰角测量示意图
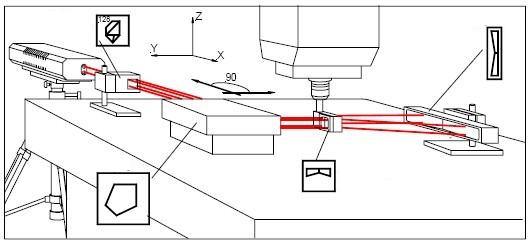
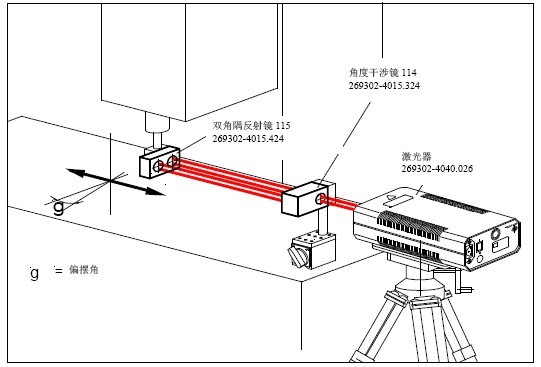 以上是偏摆角测量示意图
以上是偏摆角测量示意图
 以上是滚动角测量示意图
以上是滚动角测量示意图
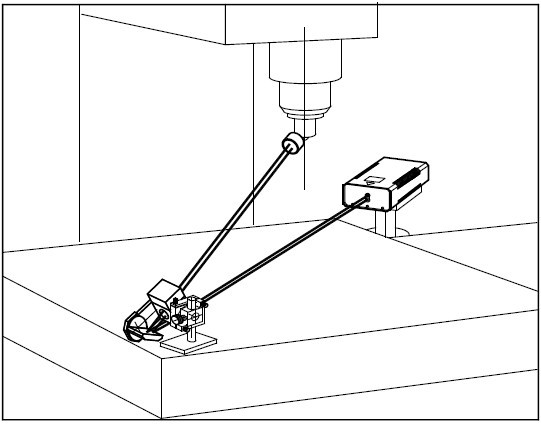
 以上是回转台定位精度测量示意图
以上是回转台定位精度测量示意图
资料下载 耶拿尔双频激光干涉仪样本(中文).pdf激光干涉仪说明书(中文).pdf
耶拿尔双频激光干涉仪样本(中文).pdf激光干涉仪说明书(中文).pdf
Fabry-Perot太赫兹Fabry-Perot扫描干涉仪
高分辨测量可达至120MHz用户可选的频率范围容易操作的软件可按照客户要求订制 技术参数:测量频率范围1):10~100 cm-1(30GHz~3THz)光谱自由程:0.8~20 cm-1分辨率2):4 x 10-3 cm-1金属栅格间隔距离:0~12 mm(或根据客户要求选择)间隔距离精度:+ / - 5 um光束高度: 100 mm有效通光孔径: 20 mm(或根据客户要求选择)尺寸: 160 (L) x 120 (W) x 130 (H) mm3重量:2.5 kg 1: 用户选择范围:10~30cm-1 或者 30~100cm-1
111光纤干涉仪
【激光系列产品】
固体激光器 半导体激光器 气体激光器 离子激光器 光纤激光器 大功率光纤耦合激光器 皮秒激光器 飞秒激光器 调Q脉冲激光器 激光二极管控制器 激光功率计 激光护目镜 激光波长测量 激光光束分析仪 多通道激光功率计 大功率激光器 激光光束位置测量仪 激光扩束镜 激光准直器 红外激光显示卡 红外激光观察仪 红外观察仪 激光测距仪 激光器温度控制器 激光光纤耦合器 高稳定性激光器 相干型激光器 自相关仪 飞秒激光倍频器 可变光阑 便携式激光器 染料激光器 激光光谱测量 热电制冷片 激光光束定位系统 2微米光纤激光器 飞秒光纤激光器 皮秒光纤激光器 脉冲光纤激光器 光纤隔离器 拉曼激光器 光功率计
【光谱测试仪器】
紫外可见光谱仪 便携式光谱仪 高分辨率光谱仪 高灵敏度光谱仪 制冷型光谱仪 中红外光谱仪 荧光光谱仪 拉曼光谱仪 极紫外光谱仪 真空紫外光谱仪 多通道光谱仪 教学型光谱仪 LED光测量光谱仪 色坐标色温测量仪 灯具光谱测量仪 透射谱吸光度光谱仪 绝对辐射光谱仪 流体吸光度光谱仪 流体荧光光谱仪 膜厚测量仪 椭偏仪 太阳能电池IPCE测量系统 太阳能电池QE测量系统 太阳能电池光谱响应系统 单色仪 滤光片轮 滤光片透射率测试仪 太赫兹光谱仪 等离子体光谱仪 环境辐射仪 近红外光谱仪 元素分析仪 氧含量测量 信号发生器 近红外谷物接收系统 颗粒分析仪 荧光寿命光谱仪 三维表面轮廓仪
【光学精密机械】
干涉仪 光学平台 光学镜架 手动平移台 手动旋转台 手动摆动台 手动组合平台 电动平移台 电动转动台 电动摆动平台 电动组合平台 压电陶瓷平台 压电陶瓷制动器 高稳定防震平台
【光源】
氙灯光源 氘灯光源 氘卤双光源 LED光源灯 卤素灯光源 光催化氙灯光源 积分球 积分球均匀光源 太阳模拟器 紫外固化机 宽带超连续光源 显微镜光源
【光学影像】
紫外CCD相机 近红外CCD相机 制冷型CCD相机 高速相机 显微镜 CID相机 红外相机/热像仪
【光学元件】
窗片/窗口 反射镜 透镜 光学基片 分光镜 棱镜 晶体 滤光片 波长板 扩散板 起偏器 光学镜头 光纤产品 光栅尺 光栅
【光通信仪器】
ASE光源 光纤放大器 光通信激光器 光功率计 可调谐激光光源 光纤测量系统 光衰减器 光纤熔接机 光通信探测器 光调制器 SLED光源 SLED模块 光源 高功率EDFA 光收发机 拉曼EDFA组合放大器 拉曼泵浦模块 偏振光合束器 拉曼放大器
【生物分析仪器】
动物注射泵 样品均质器 粘合剂分配器 蠕动泵
111斐索干涉仪
【激光系列产品】
固体激光器 半导体激光器 气体激光器 离子激光器 光纤激光器 大功率光纤耦合激光器 皮秒激光器 飞秒激光器 调Q脉冲激光器 激光二极管控制器 激光功率计 激光护目镜 激光波长测量 激光光束分析仪 多通道激光功率计 大功率激光器 激光光束位置测量仪 激光扩束镜 激光准直器 红外激光显示卡 红外激光观察仪 红外观察仪 激光测距仪 激光器温度控制器 激光光纤耦合器 高稳定性激光器 相干型激光器 自相关仪 飞秒激光倍频器 可变光阑 便携式激光器 染料激光器 激光光谱测量 热电制冷片 激光光束定位系统 视频显微镜测量系统 2微米光纤激光器 飞秒光纤激光器 皮秒光纤激光器 脉冲光纤激光器 光纤隔离器 拉曼激光器 光功率计
【光谱测试仪器】
紫外可见光谱仪 便携式光谱仪 高分辨率光谱仪 高灵敏度光谱仪 制冷型光谱仪 中红外光谱仪 荧光光谱仪 拉曼光谱仪 极紫外光谱仪 真空紫外光谱仪 多通道光谱仪 教学型光谱仪 LED光测量光谱仪 色坐标色温测量仪 灯具光谱测量仪 透射谱吸光度光谱仪 绝对辐射光谱仪 流体吸光度光谱仪 流体荧光光谱仪 膜厚测量仪 椭偏仪 太阳能电池IPCE测量系统 太阳能电池QE测量系统 太阳能电池光谱响应系统 单色仪 滤光片轮 滤光片透射率测试仪 太赫兹光谱仪 等离子体光谱仪 环境辐射仪 近红外光谱仪 元素分析仪 氧含量测量 信号发生器 近红外谷物接收系统 颗粒分析仪 荧光寿命光谱仪 三维表面轮廓仪
【光学精密机械】
干涉仪 光学平台 光学镜架 手动平移台 手动旋转台 手动摆动台 手动组合平台 电动平移台 电动转动台 电动摆动平台 电动组合平台 压电陶瓷平台 压电陶瓷制动器 高稳定防震平台
【光源】
氙灯光源 氘灯光源 氘卤双光源 LED光源灯 卤素灯光源 光催化氙灯光源 积分球 积分球均匀光源 太阳模拟器 紫外固化机 宽带超连续光源 显微镜光源
【光学影像】
紫外CCD相机 近红外CCD相机 制冷型CCD相机 高速相机 显微镜 CID相机 红外相机/热像仪
【探测器】
照度计 亮度计 辐射计 便携式色差计 太阳光功率计 快速反应探测器 前置放大探测器 光纤耦合探测器 液氮制冷探测器 皮秒超快探测器 位敏探测器 四象限探测器 双色探测器 紫外辐照计 硅光电探测器 近红外探测器 中红外探测器 雪崩二极管 光电倍增管
【光学元件】
窗片/窗口 反射镜 透镜 光学基片 分光镜 棱镜 晶体 滤光片 波长板 扩散板 起偏器 光学镜头 光纤产品 光栅尺 红外镜头 光栅
【光通信仪器】
ASE光源 光纤放大器 光发射机 光通信激光器 光功率计 可调谐激光光源 光纤测量系统 光衰减器 光纤熔接机 光通信探测器 光调制器 传感器解调仪 SLED光源 SLED模块 光源 高功率EDFA 光收发机 激光发射机 拉曼EDFA组合放大器 拉曼泵浦模块 偏振光合束器 拉曼放大器
【生物分析仪器】
动物注射泵 样品均质器 粘合剂分配器 蠕动泵
该公司产品分类:
光学仪器
最新产品
- 电热鼓风恒温两用箱 2025/4/26 11:56:19
- 电热鼓风恒温两用箱 2025/4/26 11:36:11
- 污泥干燥机 污泥干燥设备 污泥干化设备 2025/4/26 11:34:53
- 电热鼓风恒温两用箱 2025/4/26 11:34:11
- 电热鼓风恒温两用箱 2025/4/26 11:32:31
- 电热鼓风恒温两用箱 2025/4/26 11:30:54
- 电热鼓风恒温两用箱 2025/4/26 11:28:26
- 电热鼓风恒温两用箱 2025/4/26 11:26:56
- 电热鼓风恒温两用箱 2025/4/26 11:24:23
- 电热鼓风恒温两用箱 2025/4/26 11:21:47
- 新生儿手持黄疸仪 精准无痛 体积小 携带方便 2025/4/26 11:02:24
- 核级螺纹密封胶 2025/4/26 10:22:55
- 防咬合石墨密封膏 2025/4/26 10:13:17
- 电热鼓风恒温两用箱 2025/4/26 10:02:03
- 多用途润滑脂 2025/4/26 10:01:11
- 电热鼓风干燥箱 2025/4/26 9:55:52
- 电热鼓风干燥箱 2025/4/26 9:50:35
- 电热鼓风干燥箱 2025/4/26 9:49:03
- 电热鼓风干燥箱 2025/4/26 9:45:11
- 电热鼓风干燥箱 2025/4/26 9:42:54
- 电热鼓风干燥箱 2025/4/26 9:41:27
- 电热鼓风干燥箱 2025/4/26 9:37:10
- 电热鼓风干燥箱 2025/4/26 9:35:06
- 电热鼓风干燥箱 2025/4/26 9:18:37
- 核级平面密封胶 2025/4/26 9:13:43
- 电热鼓风干燥箱 2025/4/26 9:13:04
- 干货分享Staubli机器人(维修)服务好 2025/4/26 8:54:01
- FANUC机器人M-410iC/500保养(维修)全程保障 2025/4/26 8:52:40
- 解析泰禾工业机械手(维修)服务周到 2025/4/26 8:51:26
- 快掌握DENSOEPSON机器人(维修)收藏学习 2025/4/26 8:50:08