Ginkgo USB-I2C适配器控制MPU6050三轴加速度陀螺仪模块的三轴加速度陀螺仪
典型应用:
- 运动感测游戏,虚拟现实;- 电子稳像,光学稳像,行人导航器;- 零触控手势,用户接口认证,飞控姿势;
方案特色:
- 以数字输出6轴或9轴的旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据;- 传感器内置16bitAD转换器,16位数据输出;- 数字运动处理(DMP: Digital Motion Processing)引擎可减少复杂的融合演算数据、感测器同步化、姿势感应等的负荷;- 内建之运作时间偏差与磁力感测器校正演算技术,免除了客户须另外进行校正的需求;
性能:
- 模块尺寸大小:11.5mm X 16.5mm;- 工作电压:3.3V~5V;- 陀螺仪范围:±250 500 1000 2000°/s;- 加速度范围:±2±4±8±16g;- 全格感测范围:±250、±500、±1000与±2000°/s;- 输出:I2C接口通信协议;
应用实例简介:
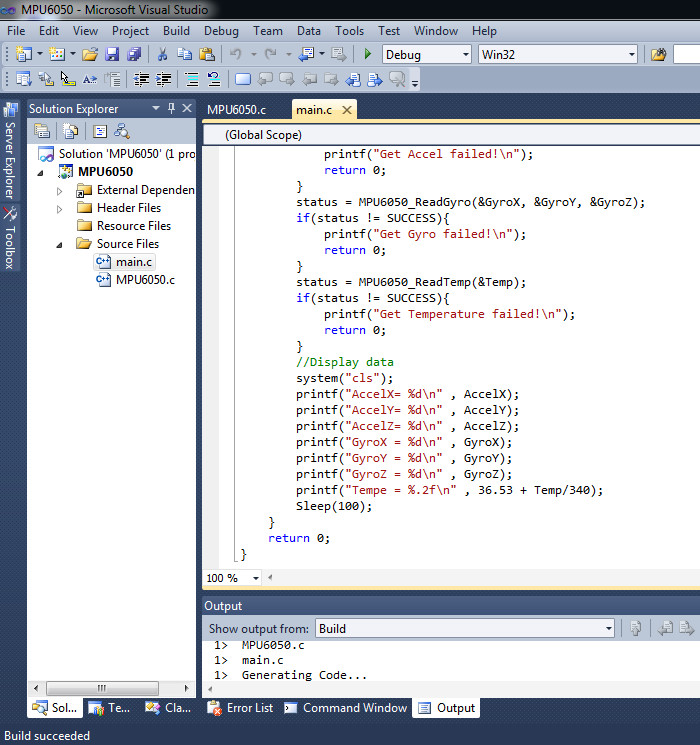
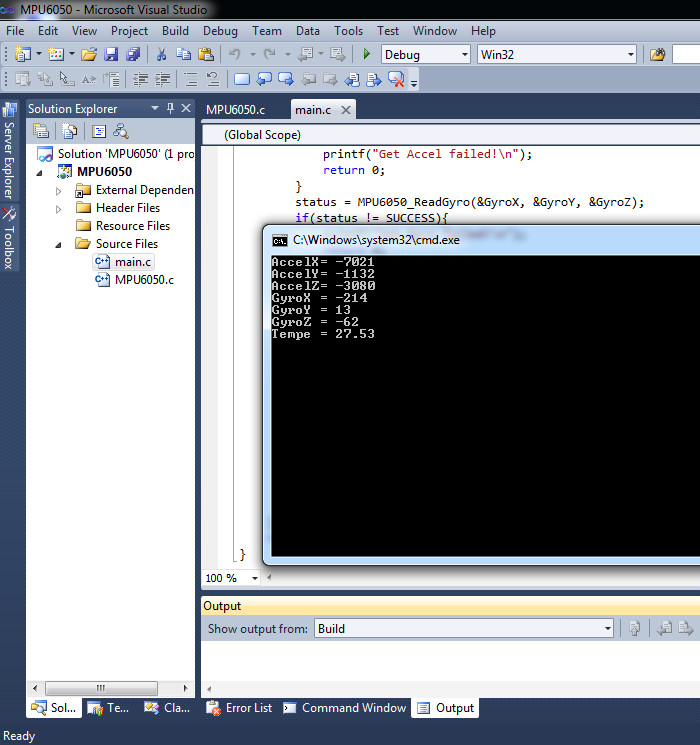
使用PC通过Ginkgo USB-I2C适配器控制MPU6050三轴加速度陀螺仪模块实现角度加速度数据采集,在VS2010平台下显示角度及加速度数据值;
支持系统:
- Windows 10、Windows 8/8.1、Windows 7、Windows XP、Windows 2000、Windows Server
USB-I2C适配器简介典型应用:
- I2C总线设备,芯片控制、调试;- I2C接口传感器测试;- I2C存储器EEPROM数据读写;- I2C总线设备故障检测维修;- PMBus和SMBus总线接口芯片控制;- 协助开发I2C主机程序;- 脉冲计数器;- 模拟电压测量,GPIO输入输出控制;- PWM信号输出;- USB转双串口/TTL(兼容RS485总线模式);
功能:
- 支持Windows、Linux、MAC OS三大主流系统;- 支持Android(安卓)和Raspberry Pi(树莓派);- USB总线供电,无需外接电源,5V和3.3V电源输出,最大电流可达500mA,带短路保护;- 可作I2C总线主机(Host/Master)或从机(Slave),实现USB和I2C总线双向适配转换;- 2通道硬件I2C(标准模式),8通道软件I2C(GPIO模式),硬件I2C频率可达1.2MHz,软件I2C频率可达400KHz,频率任意可调;- 支持PMBus和SMBus,提供专门针对两种总线的接口函数库;- 多套免费上位机软件,应对不同用户实际需求,与LabviEW无缝挂接;- 支持USB-SDI12、USB-EasyScale、USB-UART总线转换,支持计数器、PWM输出、ADC采样、GPIO输入输出控制等功能;- 同一台PC可接入多个USB-I2C适配器同时进行工作(最多可支持100个);- 支持USB-RS485,输出RS485总线控制信号(DE),最大波特率可达2.25Mbps;- 用户可免费更新、升级软件,同一个硬件通过软件更新实现不同功能(如USB-I2C适配器更新为USB-SPI或USB-CAN适配器);- 完全开放底层接口函数,可二次开发,提供详细的函数说明文档及各种语言平台的应用实例(Labview、C#、VC、Qt、Python、Labwindows/CVI、C++ Builder、VB、VB.NET、Delphi、CodeBlocks、GCC、Eclipse、Android Studio等);
性能:
- USB总线供电,USB2.0通信接口;- 2通道硬件I2C(标准模式),8通道软件I2C(GPIO模式),硬件I2C速率1.2Mbps,软件I2C速率400Kbps,总线速率任意可调;- 8路ADC(12bit)模拟电压信号(0~3.3V)测量,最大采样率1MHz;- 16路GPIO,可配置为输入输出管脚,所有管脚兼容TTL电平;- 4路脉冲计数器输入通道,可对脉冲上升沿、下降沿进行计数;- 2路UART,可输出RS485总线控制信号(DE),最大波特率可达2.25Mbps;- 8路PWM信号输出,输出占空比可调(0%~100%),输出频率可调(1Hz~20MHz);- 16路EasyScale总线信号输出,可对总线时序进行调节;- 2路SDI12总线输出(需要外接收发器),有专门针对SDI12的命令发送和接收函数量;- 安全电压范围:0~5V;- 硬件部分尺寸:103mm×53mm×28mm,硬件部分重量:约200g;- 工作温度范围:-40℃~85℃;
软件简介:
USB-I2C Classic:最基本的I2C数据发送和接收(支持从机模式),推荐在对数据处理不复杂或数据量不大的情况下使用;
USB-I2C Classic(Android):可实现I2C总线数据收发,Android端也有相应的接口函数库;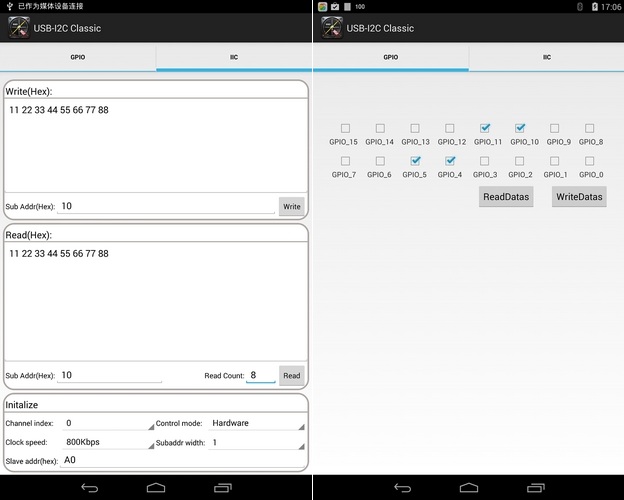
USB-I2C EEPROM:专门对I2C接口的EEPROM存储器进行数据读写,在对I2C接口的EEPROM芯片进行数据烧写或者读取的时候非常方便,该软件只能在标准I2C模式下使用,可以在软件界面上修改EEPROM芯片地址;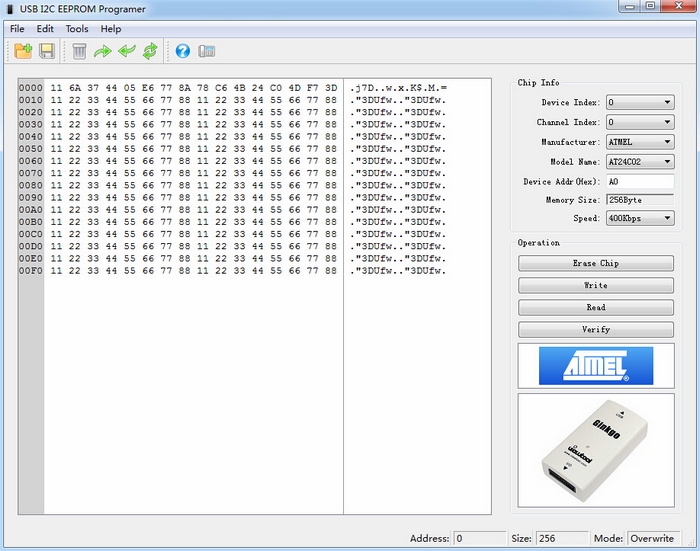
USB-I2C Extend:数据发送或读取可预先编辑在一个列表中,软件即可按照列表编辑的操作方式进行数据读写,推荐在对I2C接口芯片需要进行较为复杂的控制时使用该软件;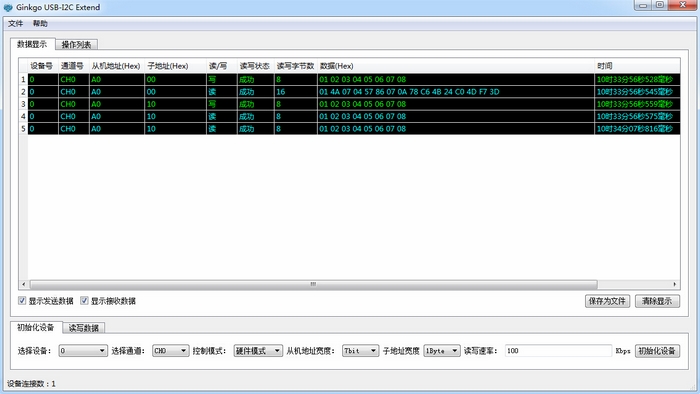
USB-I2C PMBus:专门针对PMBus和SMBus总线控制的软件,按照PMBus&SMBus总线协议收发数据,可针对某个SMBus或PMBus总线芯片编辑好命令列表,软件即根据命令列表进行数据收发(也可作为常规的I2C总线数据收发);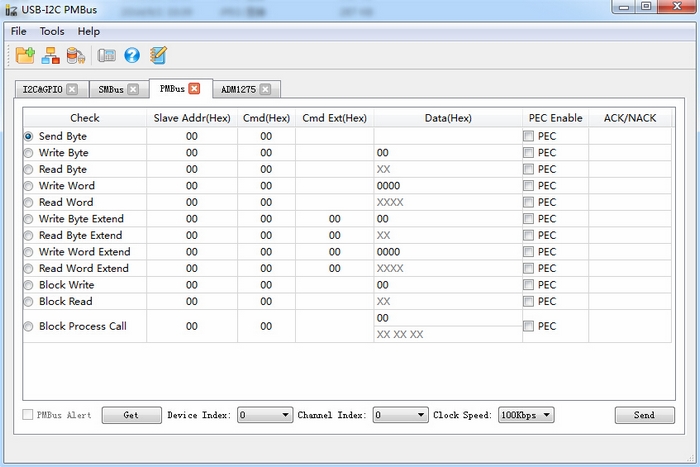
应用实例简介:
适配器通过控制MPU6050加速度传感器实现加速度值和温度值测量,并以波形方式显示;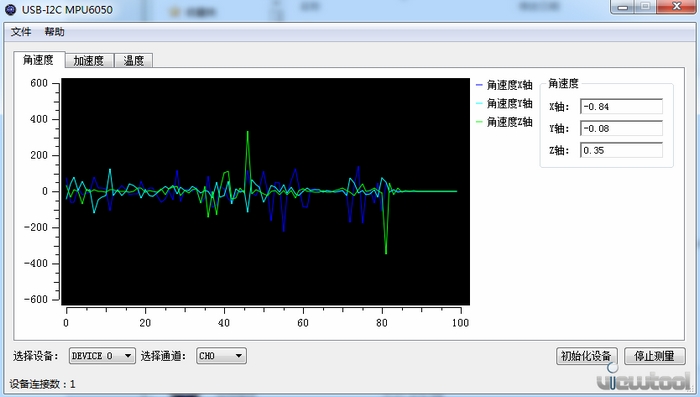
适配器通过控制BMP180气压传感器实现大气压强、环境温度测量,同时程序内部根据气压值算出当前海拔高度;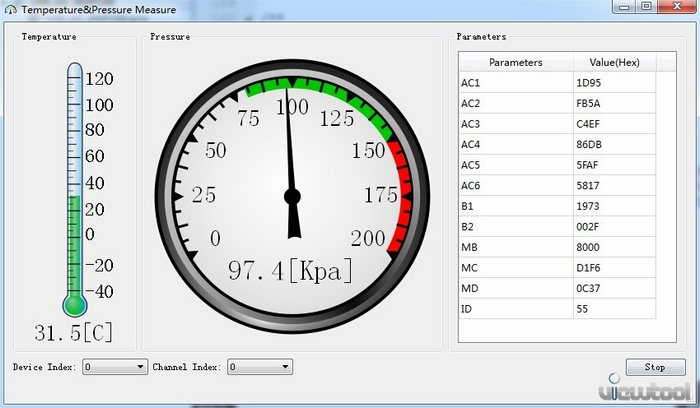
适配器通过控制MLX90614传感器实现红外测温,同时也获取传感器内部寄存器的值;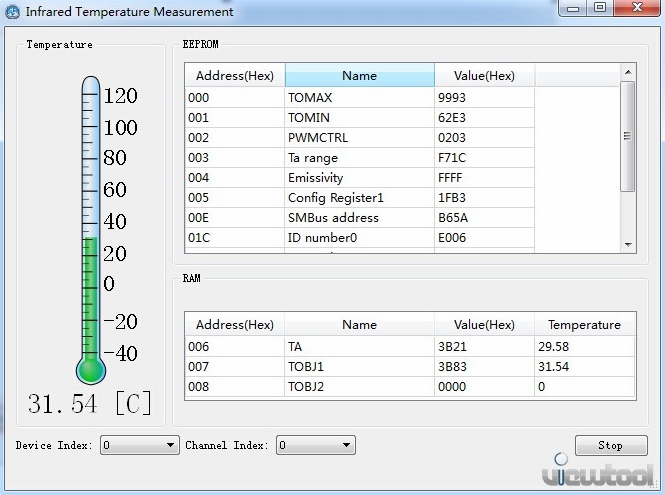
适配器通过控制AM2311/AM2321B传感器实现温度、湿度测量,温湿度值可实时显示,也能显示历史波形数据;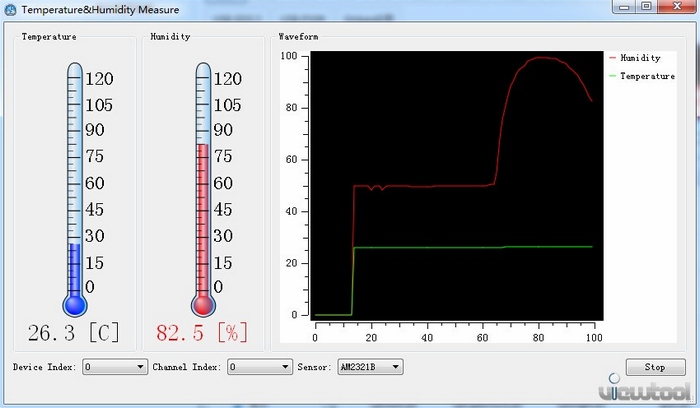
适配器通过控制TCS3414传感器实现一个颜色识别器;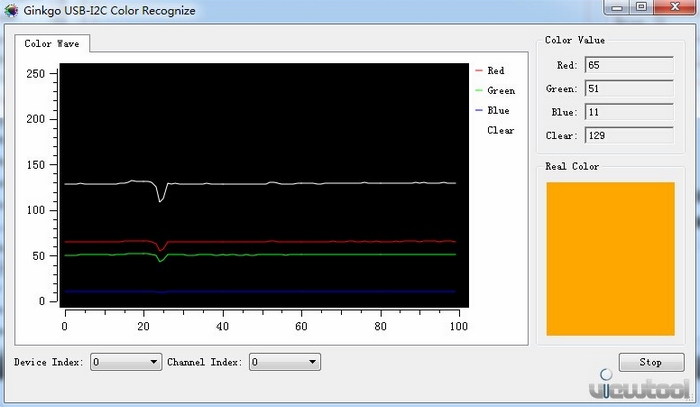
支持系统:
- Windows 10、Windows 8/8.1、Windows 7、Windows XP、Windows 2000、Windows Server- Linux、Android、Raspberry Pi- MacOS/Darwin、NetBSD、OpenBSD、FreeBSD、Solaris
产品包含:
- Ginkgo USB-I2C适配器 x 1- MPU6050三轴加速度陀螺仪模块 x 1- USB数据线 x 1- 杜邦线 x 20- 高精度测试夹 x 10- 纬图系列产品快速指南 x 1
该产品支持用户定制(详情请访问纬图官方网站:www.viewtool.com): - 让您以最小的成本资源开发,从而更专注于产品核心竞争力;并且您的终端客户能够轻易的和您的底层嵌入式系统环境接口;- 专门针对您的竞争优势而设计;- 低成本、简单易用;
*终身技术支持,一年免费维修,无法维修免费更换
*其它详细说明请见用户手册或相应说明文档
NV-VG100垂直陀螺仪NV-VG100
| 应用范围 | 特点 |
|
|
数据格式: 连接管脚定义:
| 字节 | 类型 | 定义 |
| 0 | unsigned char | 起始 |
| 1 | unsigned char | FLAG |
| 2~3 | unsigned short | 计时器 |
| 4~5 | short | 横滚角 |
| 6~7 | short | 俯仰角 |
| 8~9 | short | 陀螺仪X轴 |
| 10~11 | short | 陀螺仪Y轴 |
| 12~13 | short | 陀螺仪Z轴 |
| 14~15 | short | 加速度计X轴 |
| 16~17 | short | 加速度计Y轴 |
| 18~19 | short | 加速度计Z轴 |
| 20~21 | unsigned short | 温度 |
| 22 | unsigned char | 校验和 |
| 管脚 | 定义 |
| 1 | NC(制造用) |
| 2 | RS232接收端(RX) |
| 3 | RS232发送端(TX) |
| 4 | NC(制造用) |
| 5 | RS232地 |
| 6 | 电源正极 |
| 7 | 电源地 |
性能参数:
| 物理特性 | 尺寸 | 96mm×78mm×81mm |
| 重量 | 630 g | |
| 电源 | 9~30 VDC, 0.2 A, 2W@10VDC | |
| 激活时间 | <1 s | |
| 姿态 | 静态初始化时间 | 30 s |
| 静态精度 | <0.3 °, 1s | |
| 动态精度 | <1.5 °, 1s | |
| 陀螺仪 | 偏差可重复性 | <0.3 °/s, 1s |
| 随机漂移 | <108 °/hr/Hz½(1.8 °/hr½) | |
| 比例因子稳定性 | <0.5%, 1s | |
| 偏差变化率 | <0.8 °/s, 1s (-25~+80 °C) | |
| 带宽 | >25 Hz, 增益 @–3dB | |
| 加速度计 | 偏差可重复性 | <2*R1 mg, 1s |
| 随机漂移 | <0.3*R1m/s/hr½ | |
| 比例因子稳定性 | 0.2%, 1s | |
| 偏差变化率 | <5 mg, 1s (-25~+80 °C) | |
| 带宽 | >100 Hz, 增益 @ –3dB | |
| 测量范围 | 俯仰和横滚角 | ±180 ° |
| 角速度 | ±100 °/s 或 ±200 °/s | |
| 加速度 | ±2 g, ±5 g, 或±10 g | |
| 输出率 | >140 Hz @38,400波特率 | |
| 性(预期) | 10Kh MTBF | |
| 输入/输出 | RS232 | |
| 使用环境 | 温度 | -40~+80 °C |
| 振动 | 6 g @ 20~2000 Hz | |
| 冲击 | 90 g | |
LCG50微机械陀螺仪
基本指标 | |||
参数 | 概括指标 | ||
系列号 | LCG50- 100 | LCG50- 250 | LCG50-500 |
输入电压(正常)* | +5.0Vdc | ||
输入电流 | <8 mA @ +5.0 Vdc | ||
性能 | |||
标准测量范围* | ±100°/s | ±250°/s | ±500°/s |
比例因子校准(22oC典型值) | 20mV/°/sec ±15% | 8 mV/°/sec ±15% | 3.2 mV/°/sec ±15% |
比例因子全温校准 | <0.03%/°C | <0.05%/°C | <0.1%/°C |
轴校准(22oC典型值) | 2.5 Vdc ± 0.1 Vdc | +2.5 Vdc ± 0.1 Vdc | +2.5 Vdc ± 0.2 Vdc |
全温轴变化 | 5°/sec | 8°/sec | 20°/sec |
G 灵敏度(典型) | < 0.05/°/sec/g | ||
启动时间 | <2sec | ||
带宽-3dB* | >50Hz | ||
非线性(典型值)%全范围 | <0.05% | ||
输出噪音(DC to 100Hz典型值) | 0.005º/sF.S | 0.006º/sF.S | <0.01°/s/√Hz |
环境 | |||
操作温度 | -40°C to +85°C | ||
储存温度 | -55°C to +100°C | ||
振动操作范围 | 5g RMS | ||
最大振动范围 | 10g RMS | ||
冲击 | 500g PK 1/2 sine 2 msec | ||
重量 | <10g | 12g | |
刚体陀螺仪/陀螺仪
一、产品介绍 陀螺仪(gyroscope)的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。我们骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
在现实生活中,陀螺仪发生的进动是在重力力矩的作用下发生的。

二、产品结构
从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动。更确切地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪,
陀螺仪的基本部件有:
(1) 陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);
(2) 内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);
(3) 附件(是指力矩马达、信号传感器等)。
历史
1850年法国的物理学家莱昂•傅科(J.Foucault)为了研究地球自转,先发现高速转动中的转子(rotor),由于惯性作用它的旋转轴永远指向一固定方向,他用希腊字 gyro(旋转)和skopein(看)两字合为gyro scopei 一字来命名这种仪表。
三、产品特性
陀螺仪被用在飞机飞行仪表的心脏地位,是由于它的两个基本特性:一为定轴性(inertia or rigidity),另一是逆动性(precession),这两种特性都是建立在角动量守恒的原则下。
1、定轴性
当陀螺转子以高速度旋转时,就产生了惯性,这惯性使得陀螺转子的旋转轴保持在空间,指向一个固定的方向,同时反抗任何改变转子轴向的力量,这种物理现象称为陀螺仪的定轴性或惯性。 其惯性随以下的物理量而改变:
1)转子质量愈大,惯性愈大;
2)转子旋转半径愈大,惯性愈大;
3)转子旋转速度愈大,惯性愈大;
2、逆动性
在运转中的陀螺仪,如果外界施一作用或力矩在转子旋转轴上,则旋转轴并不沿施力方向运动,而是顺着转子旋转向90度垂直施力方向运动,此现象即是逆动性。
逆动性的大小也有三个影响的因素:
1)外界作用力愈大,其逆动性也愈大;
2)转子的质量惯性矩(moment of inertia)愈大,逆动性愈小;
3)转子的角速度愈大,逆动性愈小;
而逆动方向可根据逆动性原理取决于施力方向及转子旋转方向。
实验目的
直观地演示旋转刚体(陀螺)在外力作用下的进动和不受外力矩时角动量方向保持不变的特性。
实验原理
绕旋转对称轴以很大的角速度转动的刚体就是陀螺。如果没有外力矩的作用,陀螺转动轴的方向(角动量方向)将保持不变,称为定轴性。迅速转动的陀螺若受到外力矩(如重力力矩)的作用时,它并不是立即倾倒,而是使其转动轴绕着某一固定轴缓缓转动,即角动量在外力矩的作用下进动。
由于摩擦力、空气阻力等因素的存在,陀螺绕对称轴转动的角速度将逐渐变小,后倾倒下来。
实验仪器
1.电机驱动,演示陀螺的原理,两环三自由度,演示定向特性,附电机电源。
2.仪器尺寸:230*230*230mm
3.重量:2.6Kg
4.电源220V/50Hz
5.铝合金材质,高速电机安装在陀螺仪里面.
实验步骤
演示角动量守恒
将刚体陀螺仪器平放在桌面上,仪器周转保留一定空间。
1、接通陀螺仪上电机电源接线。
2、接通电机电源,缓幔调节电源输出电压,可见陀螺开始平稳转动,无异常振动杂音。
3、调电压至大值,约12V;待转速稳定后,即可观察陀螺转动特性。
4、当陀螺高速旋转起来时,将陀螺拿起,观察陀螺转轴的角度变化。
5、然后拿陀螺仪外框转动,可观察到陀螺转轴的角度始终不变。
注意事项
1、陀螺飞轮高速旋转时,不可用手触摸或试图阻止其转动。
2、仪器处于高速旋状态下,须有人照看。
共和加速度传感小型轴GSAT-A-900轴陀螺仪传感器
深圳市赛德力检测有限公司是香港传感器研发和生产的先导企业。公司技术实力雄厚,拥有以国外从业人员、归港留学生及大陆引进的各类高科技研发人才组成的研发队伍 200多名。产品主要有各类压力传感器及显示仪表、称重传感器及显示仪表、温度传感器及显示仪表、扭矩传感器及显示仪表、位移传感器、液位开关、光电开关等,并代理了日本NMB、CELTRON、TRANSCELL、MOTOROLA、AST、SENSTRONICS等国际知名品牌传感器及仪表。
公司产品远销美国、欧洲、日本及东南亚各国。在全球设有办事处:美国的加州及纽约、墨西哥的墨西哥城、南美的里约热内卢、德国的法兰克福、英国的斯托克城、南非的约翰内斯堡、日本的神户、越南的胡志明、泰国的曼谷、马莱西亚的吉隆坡等。客户遍及高校、科研院所、企业等,涉及行业包括航空航天、科研、军工等领域。
共和加速度传感小型轴GSAT-A-900轴陀螺仪传感器公司代理品牌: 1:土耳其OPKON位移传感器华南地区总代理 2:日本NMB美蓓亚计量产品亚洲地区总代理 3:美国AST压力传感器华南地区总代理 4:意大利AEP高精度计量传感器中国总代理 经营以下品牌: 日本NTS , 美国CELTRON世铨 , 德国LORENZ- 梅斯泰克 日本TEAC , 美国TEDEA特迪亚 , 德国HBM 日本URYU瓜生, 美国SETRA西特 ,德国TURCK 日OWA千野, 美国HONEYWELL霍尼韦尔, 德国TECSIS 日本LINIAX, 美国MEAS精量, 德国本SHOWA昭和, 美国TRANSCELL传力, 德国SICK西克 日本SANWA三和, 美国SUNCELLS, 德国PCC/PROCESS 日本KY SOEMER 日本ASAHI KEIKI旭计器, 美国DANAHER丹纳赫 韩国SETECH世泰 日本KAWA川机械, 美国SSI压力传感器, 韩国BONGSHIN 日本NOK克鲁勃润滑油, ,美国JEWELL加速度传感器, 托利多 METTLERTOLEDO共和加速度传感小型轴GSAT-A-900轴陀螺仪传感器公司合作单位: 共和加速度传感小型轴GSAT-A-900轴陀螺仪传感器品质保证:日本共和Kyowa传感器共和电业公司自从1949年创业以来,在日本首先实现了应变片国产化,作为以此为核心技术的应力测量综合机器厂家,一向积极地展开事业活动。日本共和Kyowa传感器的产品在50多个国家设立了国外办事处及售后服务中心,为日本共和Kyowa传感器提供最佳的服务与解决方案。 日本共和Kyowa称重传感器从应变片到各种传感器,测量仪器,记录器,数据处理装置,计测系统都一贯地进行开发,制造,销售,作为本行业的一流公司不仅仅在日本国内,就是在国际上也赢得了很高的评价和信赖。日本共和Kyowa称重传感器到目前为止,日本共和Kyowa称重传感器公司开发的各种装置和系统,以政府机关以及公,私立大学的各研究部门为主,在造船,重型机器,铁路,汽车,飞机,宇宙开发,坝,核能/能源开发.共和加速度传感小型轴GSAT-A-900轴陀螺仪传感器产品简介:
共和加速度传感小型轴GSAT-A-900轴陀螺仪传感器品质保证:日本共和Kyowa传感器共和电业公司自从1949年创业以来,在日本首先实现了应变片国产化,作为以此为核心技术的应力测量综合机器厂家,一向积极地展开事业活动。日本共和Kyowa传感器的产品在50多个国家设立了国外办事处及售后服务中心,为日本共和Kyowa传感器提供最佳的服务与解决方案。 日本共和Kyowa称重传感器从应变片到各种传感器,测量仪器,记录器,数据处理装置,计测系统都一贯地进行开发,制造,销售,作为本行业的一流公司不仅仅在日本国内,就是在国际上也赢得了很高的评价和信赖。日本共和Kyowa称重传感器到目前为止,日本共和Kyowa称重传感器公司开发的各种装置和系统,以政府机关以及公,私立大学的各研究部门为主,在造船,重型机器,铁路,汽车,飞机,宇宙开发,坝,核能/能源开发.共和加速度传感小型轴GSAT-A-900轴陀螺仪传感器产品简介:小型轻便,可同时测量3个方向的角速度
共和加速度传感小型轴GSAT-A-900轴陀螺仪传感器产品特点:●小型,3轴●耐冲击性 *容许冲击负载9807m/s2(1,000G)●最适合于方位测量●可以将小型3轴加速度计AMA-A(本公司产品)安装到主机上部共和加速度传感小型轴GSAT-A-900轴陀螺仪传感器公司常用型号:
CRS03微硅陀螺仪
CRS03微硅陀螺(角速度传感器)是利用Coriolis效应的单轴固态速率陀螺,其采用微硅环状振动精密设计,而产生一个正比于旋转速度的精确模拟直流电压输出。测量范围:100°/sec, ±200°/sec, ±575°/sec零位范围:2.4~2.6Vdc带宽:大于10Hz起动时间: 600ms冲击:200G以上参数获得在V=5.00V,Temp=23℃
技术指标 | 用途 |
测量范围:0 to±100°/sec | 导航 |
分辨率:0.05°/sec(0-10Hz) | 汽车安全系统 |
比例系数:20mV/(deg/sec)* | 遥控直升机 |
工作(精度):-40℃to+85℃(±3°/sec) | 车装/船载卫星天线 |
线性度:±0.5%F.S Typical | 航天、工业用 |
电源:5Vdc | 安定架 |
输出信号:类比2.5Vdc* | 测量仪器 |
输入轴:Z轴 | 船用电子罗盘补偿等 |
重量:25g | |
外形尺寸:29mm×29mm×18.4mm | |
*Ratio metric/按电源比例 |
垂直陀螺仪
VG949P(D)光纤陀螺仪
技术参数:
| 重量 | 45 克 |
| 尺寸 | 60 x 60 x 22毫米 |
| 功耗 | 0.5 瓦 |
| 供电电压 | + 5 V ±5% |
| 启动时间 | 0.01 秒 |
| 零偏重复性 | 0.01 deg/s, 1sigma |
| 零偏变化 (恒定温度) | 0.003 deg/s, 1sigma |
| 零偏变化 (完全温度范围) | 0.1 deg/s |
| 比例系数 | 7mV º/S±20% 或 数字输出RS232 |
| 比例系数重复性 | 0.1%, 1sigma |
| 比例系数变化(恒定温度) | 0.03%, 1 sigma |
| 噪音 | PSD = 0.0015°/s sqrt Hz |
| 响应频率 | 0 … 1000 Hz |
| 测量范围 | ±300deg /sec |
| 工作温度 | -30℃ to +71℃ |
| 振动 | 2g, 20 Hz to 2,000 Hz |
| 冲击 | 90g |
ADIS16350陀螺仪
供应ADI公司ADIS16350陀螺仪
ADIS16350 是一个完整的三轴陀螺和三轴加速度计组成的惯性感应系统。该传感器包涵AD公司微机械和混合信息处理技术,是一个高度集成的解决方案,提供校准后的数字惯性感应。一个SPI接口和简单输出注册结构形成了简单的系统接口和编程。ADIS166355提供在温度范围为-40到+85度的校准。
特点:三轴陀螺,数字范围比例缩放;±75, ±150, ±300设置;14位分辨率;三轴加速度计
应用:导向控制;平台控制与稳定;运动控制与分析;惯性测量系统;综合导航;图像稳定;机器人功能框图
陀螺仪管道测绘系统GSZ-160
咨询电话: 18320771884 曾小姐 随着城市建设的飞速发展,电力、通信、燃气、排水、蒸汽、化工等行业经常需要穿越铁路、公路、河等障碍物敷设管道,基于城市市容环境的考虑,在城市建成区利用非开挖技术敷设管线的情况也越来越多,由于敷设的管线埋深、位置信息都不准确的点,而常规的管线探测仪(RD8100、SR-20、探地雷达等)自身的限性(探测仪深度浅、易受电磁场干扰、探测仪环境条件差)无法获得准确的管线位置信息,导致后期交叉施工时易损坏、损坏后修复成本,易造成人员伤亡的事故,同事在城市规划管理过程中,因地下管线位置信息不准确,也造成地下空间资源浪费,为了获取非开挖管线与探测管线位置的准确性,科学的利用地下空间,大限度避管线切改,消除潜在的地下事故隐患,可利用惯性陀螺仪来对地下管线进行的定位,来解决传统探测手段不能解决的实际问题。

陀螺仪管道测绘GSZ-160咨询电话: 18320771884 曾小姐.
传统地下管线定位技术遇到的挑战:
1、实际探测深度有限,很难准确探测仪10米以下的情况;
2、易受电磁场干扰
3、探测仪环境条件差,非开挖等施工的殊性

陀螺仪管道测绘GSZ-160
解决方案:
陀螺仪管道定位系统GSZ-160,可直接测量获取整条管线的平面信息和程信息,再合成管线平面图、横纵断面图及三维视图等,形成完整、精确的管线资料,对解决非开挖施工管线探测中的技术难点提供了好的解决方案。



陀螺仪管道定位系统GSZ-160主要由:INS及密封舱体、舱体支架(根据管道类型可供选择)、数据后处理软件三部分组成。
陀螺仪管道定位系统GSZ-160拥有的数据处理方案和便捷的外业操作设计。通过惯性导航技术,能精确定位出被测管道的空间位置。
陀螺仪管道测绘GSZ-160功能点:
1、适合不同的材质、不同口径管材
2、可视化查看多管道
3、数据格式样化
4、防水防尘
5、可以根据客户需要,制定各种数据报表功能
6、可引入坐标系统,管道位置确定,不管地表、桩点如何改变,都能快速定位管道。
7、引入对坐标的测量数据可以对接城市信息化管理平台,作为城市设计、规划、施工的基础资料。


陀螺仪管道测绘GSZ-160
咨询电话: 18320771884 曾小姐.
最新产品
- HDAC6抗原;肌糖δ(SGCd)重组蛋白多种属 2025/3/12 21:00:53
- HDAC2抗原;组蛋白脱乙酰基酶2(HDAC2)重组蛋白多种属 2025/3/12 21:00:52
- HDAC1抗原;组蛋白脱乙酰基酶1(HDAC1)重组蛋白多种属 2025/3/12 21:00:51
- NASP抗原;组蛋白结合核自身抗原精子蛋白(NASP)重组蛋白多种属 2025/3/12 21:00:51
- H2B抗原;组蛋白H2B(H2B)重组蛋白多种属 2025/3/12 21:00:48
- HIST3H2A抗原;组蛋白3簇H2a(HIST3H2A)重组蛋白多种属 2025/3/12 21:00:48
- HDAC8抗原;组蛋白脱乙酰基酶8(HDAC8)重组蛋白多种属 2025/3/12 21:00:48
- HIST2H3A抗原;组蛋白2簇H3a(HIST2H3A)重组蛋白多种属 2025/3/12 21:00:48
- MYO1E抗原;肌球蛋白ⅠE(MYO1E)重组蛋白多种属 2025/3/12 21:00:26
- MYO1C抗原;肌球蛋白ⅠC(MYO1C)重组蛋白多种属 2025/3/12 21:00:26
- HDAC11抗原;组蛋白脱乙酰基酶11(HDAC11)重组蛋白多种属 2025/3/12 21:00:26
- HDAC9抗原;组蛋白脱乙酰基酶9(HDAC9)重组蛋白多种属 2025/3/12 21:00:25
- MYO1F抗原;肌球蛋白ⅠF(MYO1F)重组蛋白多种属 2025/3/12 21:00:25
- MYO1G抗原;肌球蛋白ⅠG(MYO1G)重组蛋白多种属 2025/3/12 20:52:03
- MYO5A抗原;肌球蛋白ⅤA(MYO5A)重组蛋白多种属 2025/3/12 20:48:16
- MYH3抗原;肌球蛋白重链3(MYH3)重组蛋白多种属 2025/3/12 20:38:22
- MYH2抗原;肌球蛋白重链2(MYH2)重组蛋白多种属 2025/3/12 20:34:53
- MYLK2抗原;肌球蛋白轻链激酶2(MYLK2)重组蛋白多种属 2025/3/12 20:31:48
- MYLK抗原;肌球蛋白轻链激酶(MYLK)重组蛋白多种属 2025/3/12 20:31:46
- MYL12A抗原;肌球蛋白轻链12A(MYL12A)重组蛋白多种属 2025/3/12 20:26:51
- MYL12B抗原;肌球蛋白轻链12B(MYL12B)重组蛋白多种属 2025/3/12 20:26:50
- MYL9抗原;肌球蛋白轻链9(MYL9)重组蛋白多种属 2025/3/12 20:26:50
- MYL7抗原;肌球蛋白轻链7(MYL7)重组蛋白多种属 2025/3/12 20:19:34
- MYL6B抗原;肌球蛋白轻链6B(MYL6B)重组蛋白多种属 2025/3/12 20:11:26
- MYL6抗原;肌球蛋白轻链6(MYL6)重组蛋白多种属 2025/3/12 20:09:03
- MYL4抗原;肌球蛋白轻链4(MYL4)重组蛋白多种属 2025/3/12 20:07:20
- MYL3抗原;肌球蛋白轻链3(MYL3)重组蛋白多种属 2025/3/12 20:02:28
- MYL2抗原;肌球蛋白轻链2(MYL2)重组蛋白多种属 2025/3/12 20:00:34
- MYL1抗原;肌球蛋白轻链1(MYL1)重组蛋白多种属 2025/3/12 19:58:48
- MYO7A抗原;肌球蛋白ⅦA(MYO7A)重组蛋白多种属 2025/3/12 19:56:23